

| << Chapter < Page | Chapter >> Page > |
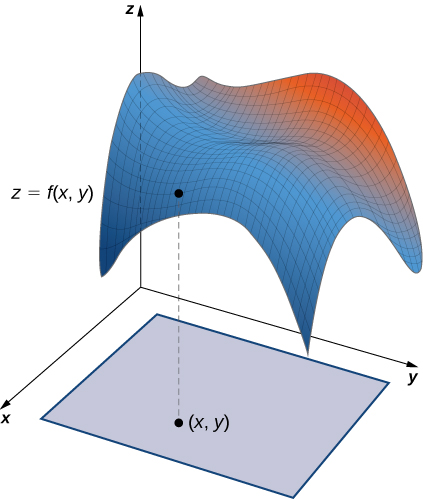
Similarly, if S is a surface given by equation or equation then a parameterization of S is
or respectively. For example, the graph of paraboloid can be parameterized by Notice that we do not need to vary over the entire domain of y because x and z are squared.
Let’s now generalize the notions of smoothness and regularity to a parametric surface. Recall that curve parameterization is regular if for all t in For a curve, this condition ensures that the image of r really is a curve, and not just a point. For example, consider curve parameterization The image of this parameterization is simply point which is not a curve. Notice also that The fact that the derivative is zero indicates we are not actually looking at a curve.
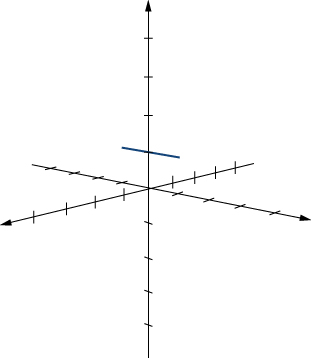
Analogously, we would like a notion of regularity for surfaces so that a surface parameterization really does trace out a surface. To motivate the definition of regularity of a surface parameterization, consider parameterization
Although this parameterization appears to be the parameterization of a surface, notice that the image is actually a line ( [link] ). How could we avoid parameterizations such as this? Parameterizations that do not give an actual surface? Notice that and and the corresponding cross product is zero. The analog of the condition is that is not zero for point in the parameter domain, which is a regular parameterization.
Parameterization is a regular parameterization if is not zero for point in the parameter domain.
If parameterization r is regular, then the image of r is a two-dimensional object, as a surface should be. Throughout this chapter, parameterizations are assumed to be regular.
Recall that curve parameterization is smooth if is continuous and for all t in Informally, a curve parameterization is smooth if the resulting curve has no sharp corners. The definition of a smooth surface parameterization is similar. Informally, a surface parameterization is smooth if the resulting surface has no sharp corners.
A surface parameterization is smooth if vector is not zero for any choice of u and v in the parameter domain.
A surface may also be piecewise smooth if it has smooth faces but also has locations where the directional derivatives do not exist.
Which of the figures in [link] is smooth?
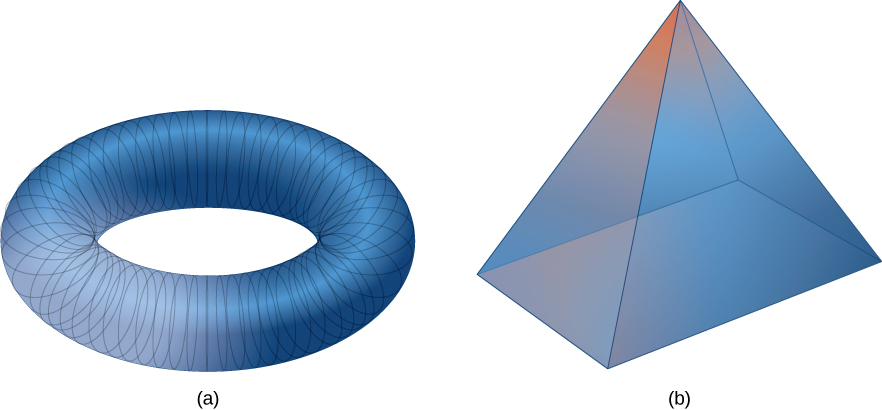
The surface in [link] (a) can be parameterized by
(we can use technology to verify). Notice that vectors
exist for any choice of u and v in the parameter domain, and
The k component of this vector is zero only if or If or then the only choices for u that make the j component zero are or But, these choices of u do not make the i component zero. Therefore, is not zero for any choice of u and v in the parameter domain, and the parameterization is smooth. Notice that the corresponding surface has no sharp corners.
In the pyramid in [link] (b), the sharpness of the corners ensures that directional derivatives do not exist at those locations. Therefore, the pyramid has no smooth parameterization. However, the pyramid consists of four smooth faces, and thus this surface is piecewise smooth.
Notification Switch
Would you like to follow the 'Calculus volume 3' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|