

| << Chapter < Page | Chapter >> Page > |
Standard digital color images of a scene of interest consist of three components – red, green and blue – which contain the intensity level for each of the pixels in three different groups of wavelengths. This concept has been extended in the hyperspectral and multispectral imaging sensing modalities, where the data to be acquired consists of a three-dimensional datacube that has two spatial dimensions and and one spectral dimension .
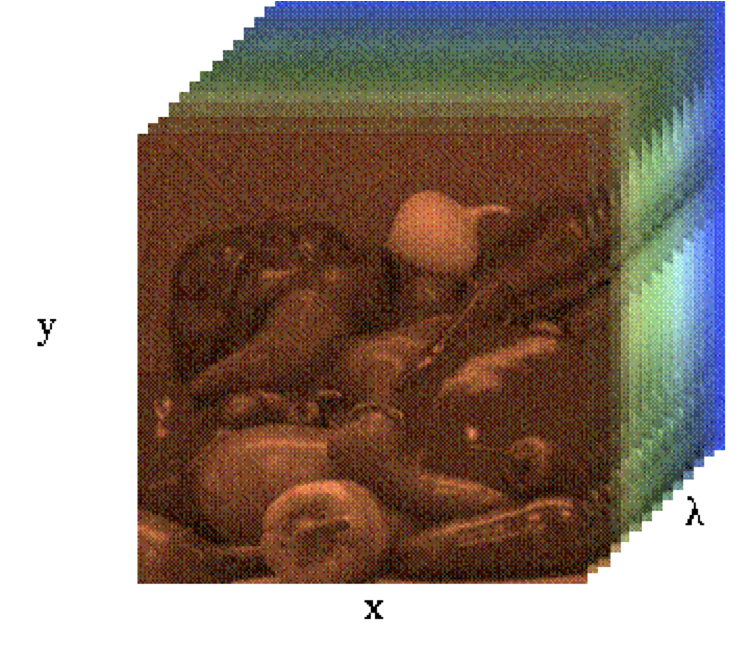
In simple terms, a datacube is a 3-D function that can be represented as a stacking of intensities of the scene at different wavelengths. An example datacube is shown in [link] . Each of its entries is called a voxel. We also define a pixel's spectral signature as the stacking of its voxels in the spectral dimension . The spectral signature of a pixel can give a wealth of information about the corresponding point in the scene that is not captured by its color. For example, using spectral signatures, it is possible to identify the type of material observed (for example, vegetation vs. ground vs. water), or its chemical composition.
Datacubes are high-dimensional, since the standard number of pixels present in a digitized image is multiplied by the number of spectral bands desired. However, considerable structure is present in the observed data. The spatial structure common in natural images is also observed in hyperspectral imaging, while each pixel's spectral signature is usually smooth.
Compressive sensing (CS) architectures for hyperspectral imaging perform lower-dimensional projections that multiplex in the spatial domain, the spectral domain, or both. Below, we detail three example architectures, as well as three possible models to sparsify hyperspectral datacubes.
The single pixel camera uses a single photodetector to record random projections of the light emanated from the image, with the different random projections being captured in sequence. A single pixel hyperspectral camera requires a light modulating element that is reflective across the wavelengths of interest, as well as a sensor that can record the desired spectral bands separately [link] . A block diagram is shown in [link] .
The single sensor consists of a single spectrometer that spans the necessary wavelength range, which replaces the photodiode. The spectrometer records the intensity of the light reflected by the modulator in each wavelength. The same digital micromirror device (DMD) provides reflectivity for wavelengths from near infrared to near ultraviolet. Thus, by converting the datacube into a vector sorted by spectral band, the matrix that operates on the data to obtain the CS measurements is represented as
This architecture performs multiplexing only in the spatial domain, i.e. dimensions and , since there is no mixing of the different spectral bands along the dimension .
Notification Switch
Would you like to follow the 'An introduction to compressive sensing' conversation and receive update notifications?

|
|

|
|
|
|
|

|
|

|
|

|
|

|
|

|
|

|
|
|
|