Introduces calculus of variations problems in optimization and their solutions based on the Euler-Lagrange equation.
The calculus of variations refers to a generic class of optimization problems that can be written in terms of
where
is a function that can be written as
where
. The function
must meet the following conditions:
is continuous on
,
, and
as individual inputs,
has continuous partial derivatives with respect to
and
, written as
Consider the set of admissible functions
. One can pick any particular admissible function
and then define the rest of the set in terms of
, where
. Therefore, at an optimum
, we require the directional derivative in the feasible directions h to be zero valued, i.e.,
for all feasible directions
. Now recall that since
is scalar-valued, we have
We use the following fact:
Fact 1 For any function
, we have that
Therefore,
where we drop the dependence of the functions for brevity (i.e.,
is written
). Using integration by parts (
,
), we get
since
, we have that
It follows that for
for all feasible directions
, we must have
which provides the following condition on the solution
of the problem
[link] :
This condition is known as the
Euler-Lagrange equation.
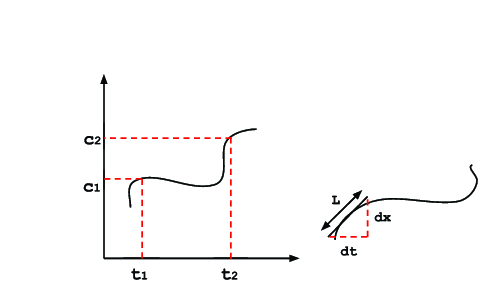
Example 1 Looking for a function
that minimizes the length of the path (curve) between the points
and
, as shown in
[link] .
Example of a calculus of variations problem: finding the curve connecting two points that achieves minimum length, which is computed in a differential fashion.
In this case, we can consider increments of the curve's length
in terms of differences of the input
and the output
:
and by integrating both sides we get that
where we have written
, and the problem has set the boundary conditions
,
. Thus, we have a calculus of variations problem.
To obtain the solution to this problem, we set up the Euler-Lagrange equation:
in words,
must be a constant as a function of
, which implies that
must be a constant function of
; such a function with constant first derivative is a straight line. Therefore, the shortest path between the two aforementioned points is obtained by the straight line that connects them.
Example 2 Consider a retirement plan with the following constraints:
Your current capital is
dollars, and ideally by the end of your life you will have spent it all; that is, if
is your capital at time
, then
and
.
Your expense rate is given by the function
, and spending
dollars gives you a quantifiable amount of enjoyment
.
The goal of the planning is to maximize your total enjoyment:
where the exponential weights enjoyment to specify that enjoyment decreases with age.
The change in your capital is given by its derivative, which must account for your expense rate and the return on investment:
where
. The problem is thus to maximize the function of your capital function
which together with the initial constraints gives us a calculus of variation problem. Thus, once again, we set up the Euler-Lagrange equation: if we denote
, then
So we obtain
Now we can switch back to the rate of expense
to get
which is a differential equation. The solution for
is therefore given by
To move forward, we need to select a candidate form for the utility function
. Our goals for this function is to showcase a diminishing marginal enjoyment as one spends increasing amounts of money (i.e.,
as
) and a sense of significantly increasing enjoyment as the amount of money spent is small but increasing (i.e.,
). A candidate function that obeys these two conditions is
, which provides
; replacing in
[link] , we get that the rate of expense must obey
Connecting back to the capital function, we get that
which is another differential equation. The solution to this equation is
In this equation we can replace
; assuming
, we can find
by setting
above; since
, we get