Introduces matrix representations of linear operators, with examples.
Linear operators involving finite-dimensional spaces can be represented in terms of matrices. Assume that
and
are finite-dimensional spaces and
. Let
I
be a orthonormal basis for
so that for all
we have
, giving
the unique set of coefficients
. Similarly, let
be an orthonormal basis for
so that for
we have
, giving
the unique set of coefficients
. We will now show that the map
can be represented in terms of their coefficient vectors as
, where
is a matrix.
Recall that
, so it can be written as
. Therefore,
Due to the uniqueness of coefficients for
in
, we have that for each
,
So we have found a matrix
with entries
that provides
. Note that the matrix will be of size
.
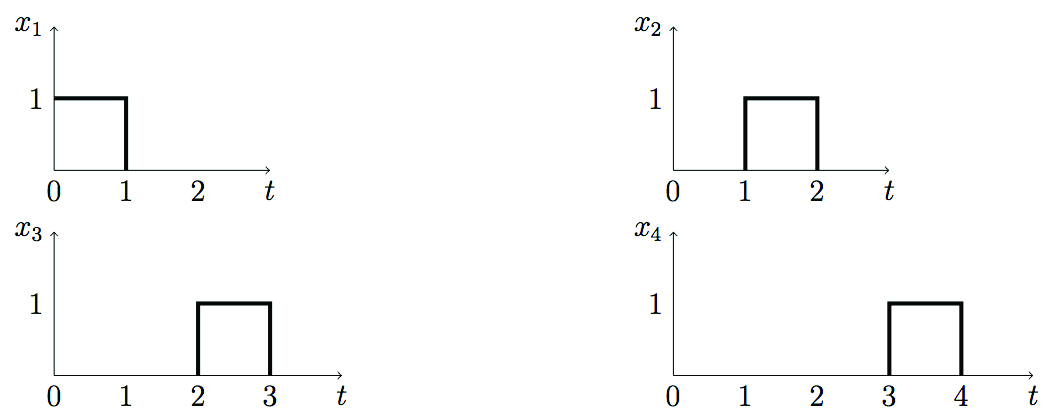
Example 1 Consider the space
defined by
, given below:
Functions in Example 1.
and the space
given by
, where
and
. We define an operator
as
It is easy to see that an orthonormal basis for
is given by the functions
. One can also show that an orthonormal basis for
is given by the functions
and
. For this choice of orthonormal bases for
and
, the transformed basis elements from
are given by
It is then easy to check that the entries of the matrix are given by
Thus, the matrix representation for the operator
using these orthonormal bases is given by