

| << Chapter < Page | Chapter >> Page > |
So far we have coded the complex number with the Cartesianpair and with the polar pair . We now show how the complexnumber may be coded with a two-dimensional vector and show how this new code may be used to gain insight about complex numbers.
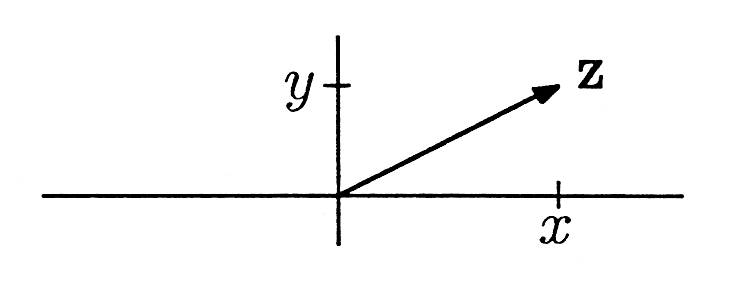
Coding a Complex Number as a Vector. We code the complex number with the two-dimensional vector :
We plot this vector as in [link] . We say that the vector belongs to a “vector space.” This means that vectors may be added and scaled according to the rules
Furthermore, it means that an additive inverse , an additive identity , and a multiplicative identity 1 all exist:
The vector is .
Prove that vector addition and scalar multiplication satisfy these properties of commutation, association, and distribution:
Inner Product and Norm. The inner product between two vectors and is defined to be the real number
We sometimes write this inner product as the vector product (more on this in Linear Algebra )
When , then the inner product between and itself is the norm squared of :
These properties of vectors seem abstract. However, as we now show, they may be used to develop a vector calculus for doing complex arithmetic.
A Vector Calculus for Complex Arithmetic. The addition of two complex numbers and corresponds to the addition of the vectors and :
The scalar multiplication of the complex number by the real number corresponds to scalar multiplication of the vector by :
Similarly, the multiplication of the complex number by the real number is
The complex product is therefore represented as
This representation may be written as the inner product
where and are the vectors and . By defining the matrix
we can represent the complex product as a matrix-vector multiply (more on this in Linear Algebra ):
With this representation, we can represent rotation as
We call the matrix a “rotation matrix.”
Inner Product and Polar Representation. From the norm of a vector, we derive a formula for the magnitude of in the polar representation :
If we define the coordinate vectors and , then we can represent the vector as
See [link] . From the figure it is clear that the cosine and sine of the angle are
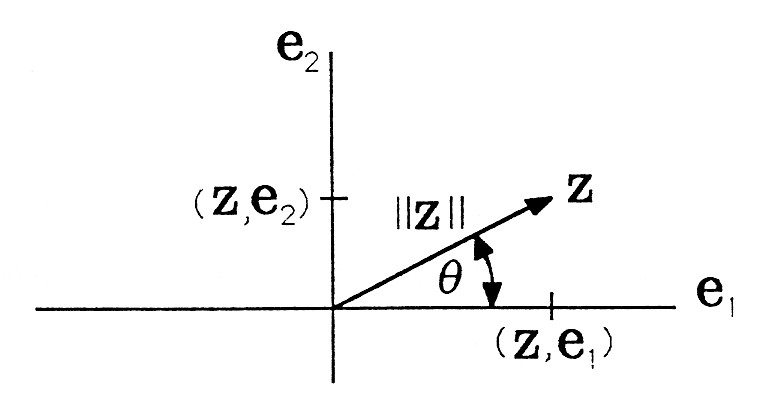
This gives us another representation for any vector :
The inner product between two vectors and is now
It follows that cos may be written as
This formula shows that the cosine of the angle between two vectors and , which is, of course, the cosine of the angle of , is the ratio of the inner product to the norms.
Notification Switch
Would you like to follow the 'A first course in electrical and computer engineering' conversation and receive update notifications?

|
|

|
|

|
|

|
|
|
|
|

|
|

|
|

|
|

|
|

|