

| << Chapter < Page | Chapter >> Page > |
The strategy of the following sections is to replace the FFT operation with an adaptive element that achieves its optimum valuewhen the phase of an estimated carrier equals the phase of the actual carrier. By moving the estimates in thedirection of the gradient of a suitable performance function, the element can recursivelyhone in on the correct value. By first assuming that the frequency is known,there are a variety of ways to structure adaptive elements that iteratively estimatethe unknown phase of a carrier. One such performance function, discussed in "Squared Difference Loop" , is the square of the difference between the received signal and a locally generated sinusoid.Another performance function leads to the well-known phase-locked loop , which is discussed in depth in "The Phase Locked Loop" , and yet another performance function leads to the Costas loop of "The Costas Loop" . An alternative approach uses the decision directed method detailed in "Decision Directed Phase Tracking" . Each of these methods is derivedfrom an appropriate performance function, each is simulated in M atlab , and each can be understood by looking at the appropriate error surface. Thisapproach should be familiar from Chapter [link] , where it was used in the design of the AGC.
"Frequency Tracking" then shows how to modify the adaptive elements to attack the frequency estimation problem.Three ways are shown. The first tries (unsuccessfully) to apply a direct adaptive method,and the reasons for the failure provide a cautionary counterpoint to the indiscriminate application of adaptive elements.The second, a simple indirect method detailed in "Indirect Frequency Estimation" , uses two loops. Since the phase of a sinusoid is the derivative of its frequency, thefirst loop tracks a “line” (the frequency offset) and the second loop fine tunes the estimation of the phase.The third technique, in "Generalized PLL" , shows how the dual-loop method can besimplified and generalized by using an integrator within a single phase-locked loop.This forms the basis for an effective adaptive frequency tracking element.
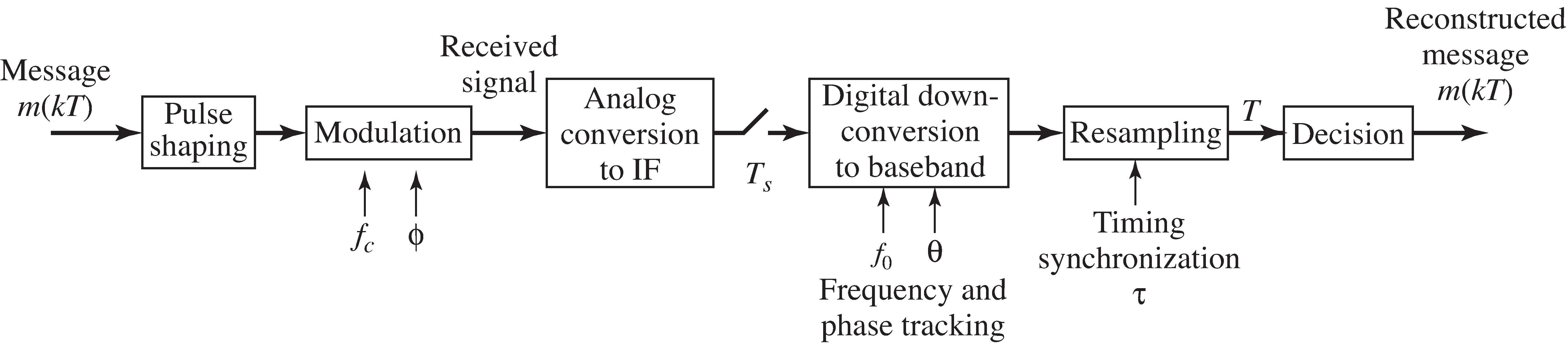
As indicated in [link] , the received signal consists of a message modulated by the carrier. In the simplest case, when the modulation uses AM with large carrier as in [link] , it may be quite easy to locate the carrier and its phase. More generally, however,the carrier will be well hidden within the received signal and some kind of extra processing will be needed tobring it to the foreground.
To see the nature of the carrier recovery problem explicitly, the following code generatestwo different “received signals”: the first is AM modulated with large carrier and the second is AM modulated withsuppressed carrier. The phase and frequencies of both signals can be recovered using an FFT, thoughthe suppressed carrier scheme requires additional processing before the FFT cansuccessfully be applied.
Notification Switch
Would you like to follow the 'Software receiver design' conversation and receive update notifications?

|
|
|
|

|
|
|
|
|
|

|
|
|
|

|
|

|
|

|