En este módulo se explica el método de recepción no coherente de las señales OOK (On-Off Keying) y FSK (Frequency Shift Keying), su esquema general y la forma de calcular la Probabilidad de Error para cada sistema.
Detección no coherente para modulaciones ook y fsk
González C. Y. Venuska
Mezoa R. Mariangela
Resumen
En este módulo se explica el método de recepción no coherente de las señales OOK (On-Off Keying) y FSK (Frequency Shift Keying), su esquema general y la forma de calcular la Probabilidad de Error para cada sistema.
En el
módulo anterior mencionábamos el método de detección coherente para obtener el mensaje original en el destino de nuestro sistema de comunicaciones. En él, por ejemplo para OOK o para PSK, se multiplicaba la señal modulada por un tono de la misma frecuencia que la señal portadora, pasando luego por un sistema de comparación con un umbral, obteniendo así el mensaje original. Sin embargo, este tipo de detección es muy costosa e innecesaria si la señal es lo suficientemente fuerte para una fiabilidad adecuada. Es por esto (y también para evitar los problemas de sincronización) que se implementan los sistemas de
detección no coherente .
Antes de observar la detección no coherente para las modulaciones OOK y FSK, se analizará la envolvente de una señal sinusoidal con ruido en Banda Base.
Supongamos que se tiene una sinusoide (portadora) contaminada con ruido pasabanda gaussiano n(t) de varianza σ² y media nula, entonces:
Como se sabe, las componentes de ruido
ni, nq son variables aleatorias independientes que tienen la misma distribución que n(t). Nuestro objetivo será buscar la función de densidad de Probabilidad
(fdp) de R ya que esto es lo que ofrece a la salida un detector de envolvente.
Si
A=0 , el valor de R se convierte en una envolvente que llamaremos An con distribución de Rayleigh:
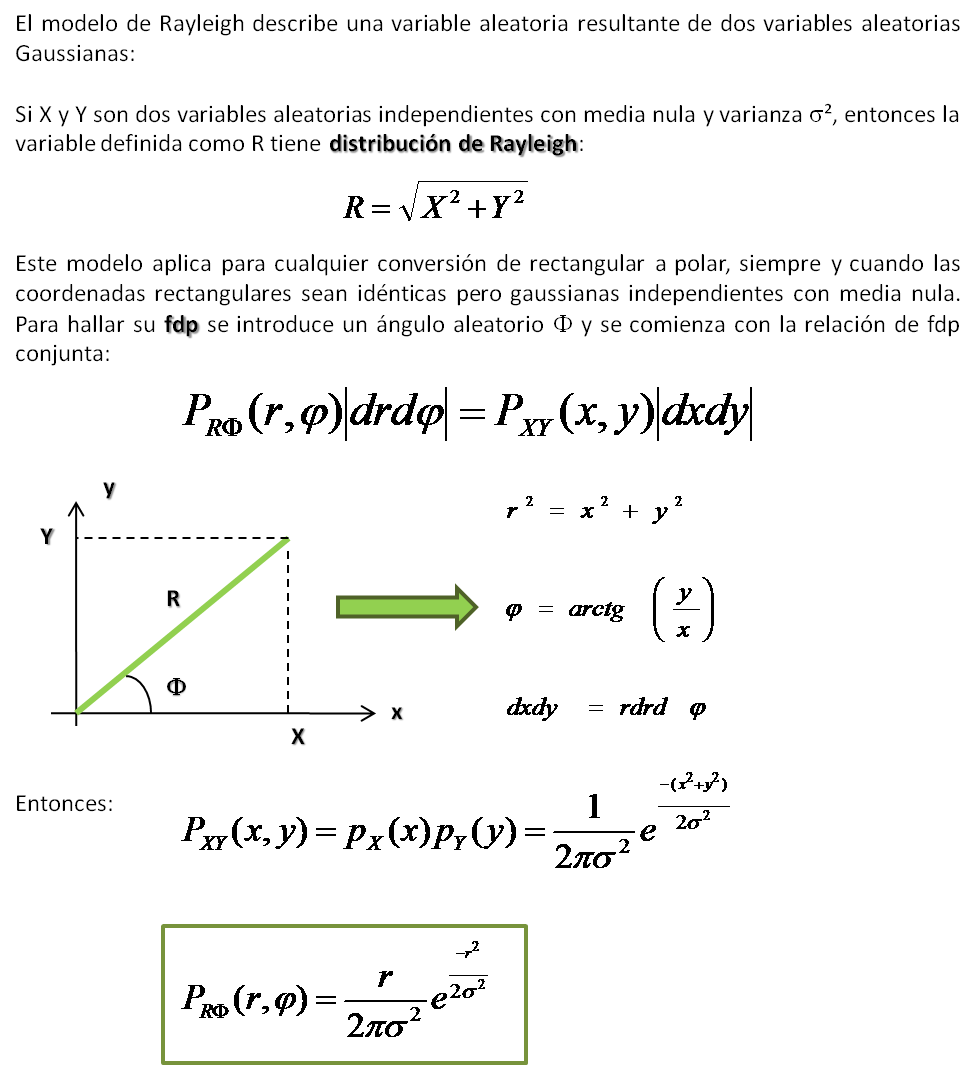
Hacemos un paréntesis aquí para recordar el modelo de Rayleigh:
Distribución rayleigh:
Si asignamos entonces un valor arbitrario para
A , hacemos la conversión de rectangular a polar para obtener la
fdp conjunta de
R y
Φ:
En la ecuación observamos que
R y Φ no son estadísticamente independientes, por lo que se deben hallar las
distribuciones marginales , es decir, la
fdp de R debe calcularse integrando la
fdp conjunta en el rango de Φ):
Aquí se identifica un elemento relacionado con la
función de Bessel modificada de primera clase y orden 0:
Por lo que:
Esta última ecuación se conoce como
Distribución Rice (
Rician Distribution ).
Si
A>>σ, El valor de R tendrá una menor proporción del ruido, por lo que:
Esto implica que la envolvente R será gaussiana ya que
ni lo es.
Para cuando A>>σ, la ecuación puede simplificarse como:
Finalmente, se confirma que la fdp es una curva Gaussiana con varianza σ² centrada en R≈A.
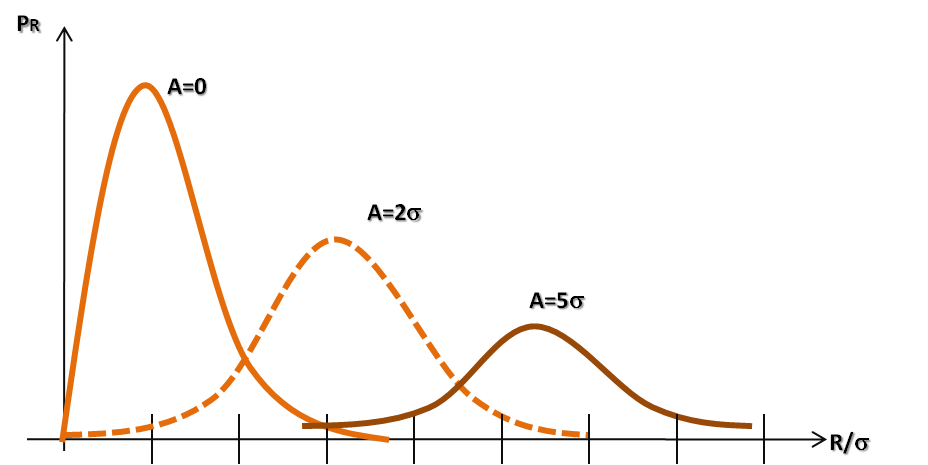
En definitiva se tienen 3 posibles distribuciones para la envolvente: Rayleigh cuando A=0, Rice cuando A es comparable con la desviación estándar del ruido y Gaussiana cuando A>>σ
fdp de la envolvente R con ruido.
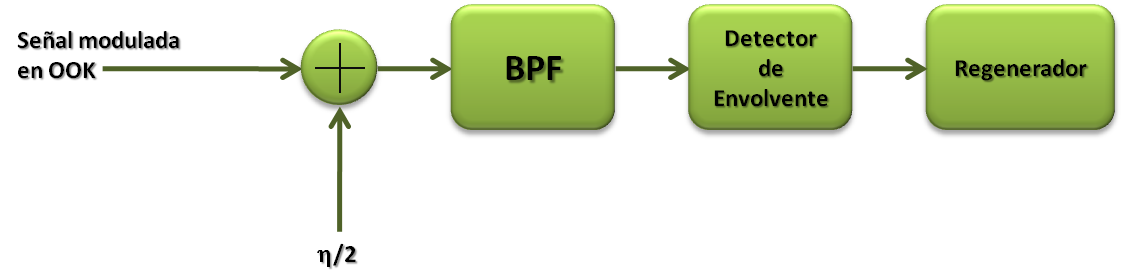
1. detección no coherente - ook
El receptor no coherente para una señal modulada OOK puede expresarse como sigue:
Como se observa, la señal modulada OOK será detectada por un filtro pasabanda, seguido por un detector de envolvente. Si se transmite un 0 lógico, el ruido tendrá distribución Rayleigh. Pero, si se transmite un 1 lógico, el ruido puede tener distribución Rice o Gaussiana.
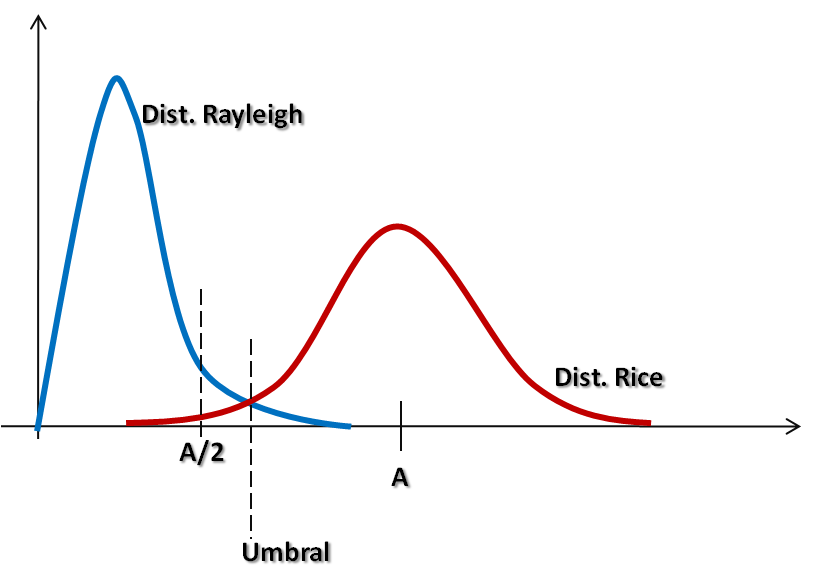
La probabilidad de error será:
La probabilidad de error tal que se transmite un 1 se calculará usando la distribución Rice. La probabilidad de error tal que se transmite un 0 será calculada usando la distribución de Rayleigh.
Al igualar las áreas obtenemos el Umbral:
Si se tiene bajo ruido (Ep/)>>1:
Finalmente:
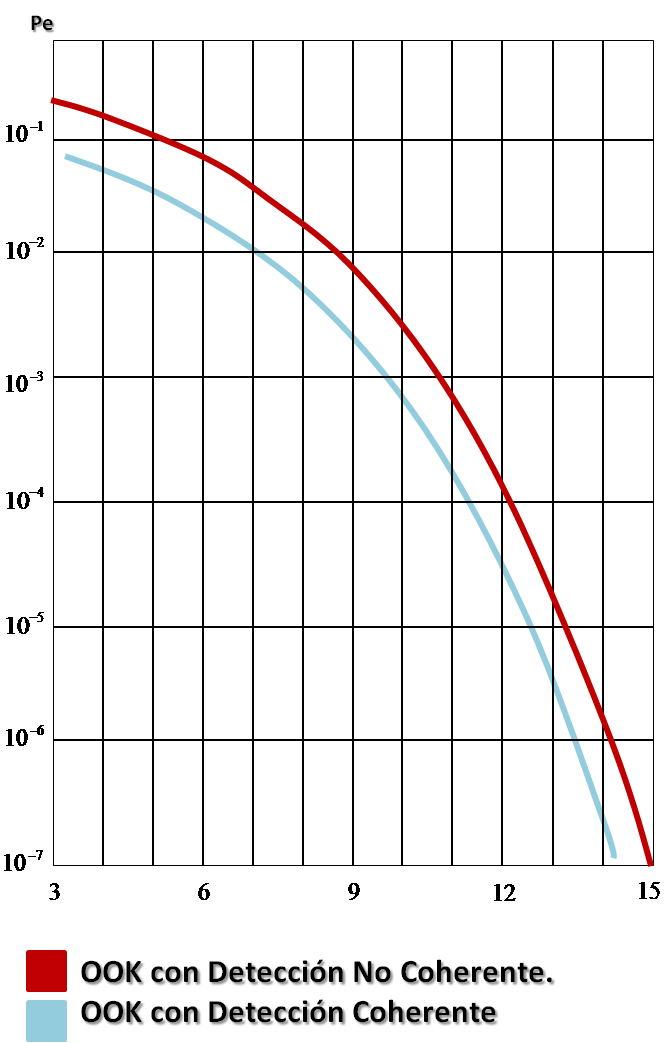
A continuación se comparan las curvas de probabilidad de error cuando se usa detector coherente y no coherente para OOK:
Como se observa, OOK con detección coherente presenta
menor valor de Probabilidad de error para un determinado valor E/. Para que OOK con detección no coherente tenga la misma probabilidad de error que con detección coherente es necesario que se transmita más potencia.
2. detección no coherente – fsk
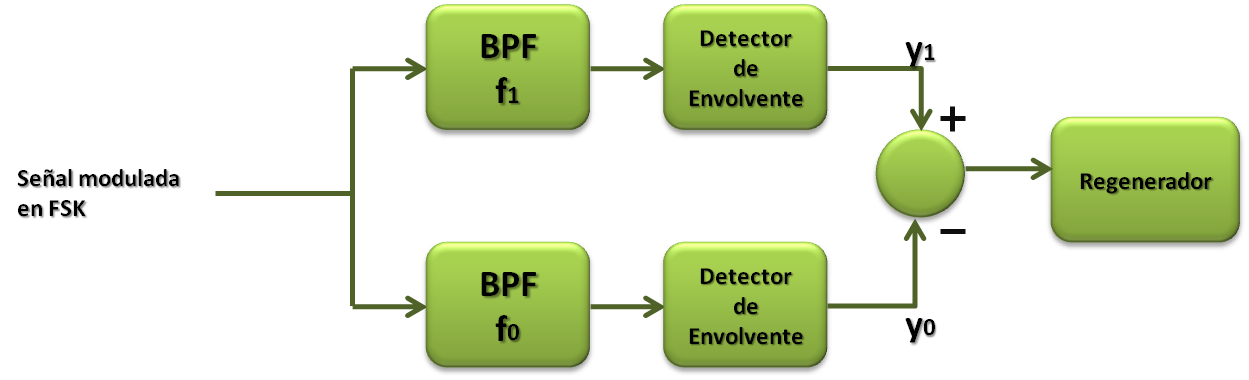
El sistema de detección no coherente para una señal FSK es:
La señal de entrada FSK entra de forma simultánea a los dos filtros Pasabanda. Cada filtro pasará la frecuencia asignada para un 1 lógico o un 0 lógico a su detector de envolvente correspondiente. Cuando llegue la señal modulada correspondiente al “0” y1 será pequeño y y0 será grande; la resta será negativa. Para un “1” la situación será opuesta
La probabilidad de error tal que se transmite un 1 se calculará usando la distribución Rice. La probabilidad de error tal que se transmite un 0 será calculada usando la distribución de Rayleigh.
La regeneración de la señal está basada en la diferencia de envolventes
Y1-Y0= y1(t)-y0(t) . Dada la simetría del receptor, no importa el valor de A, La P(e/T
1 ) será igual a:
Si hacemos los cambios de variable:
Y los sustituimos en la ecuación (d), tendremos que el integrando de la Probabilidad de Error total de FSK es exactamente la misma función correspondiente a la fdp de Distribución Rice. Por lo tanto:
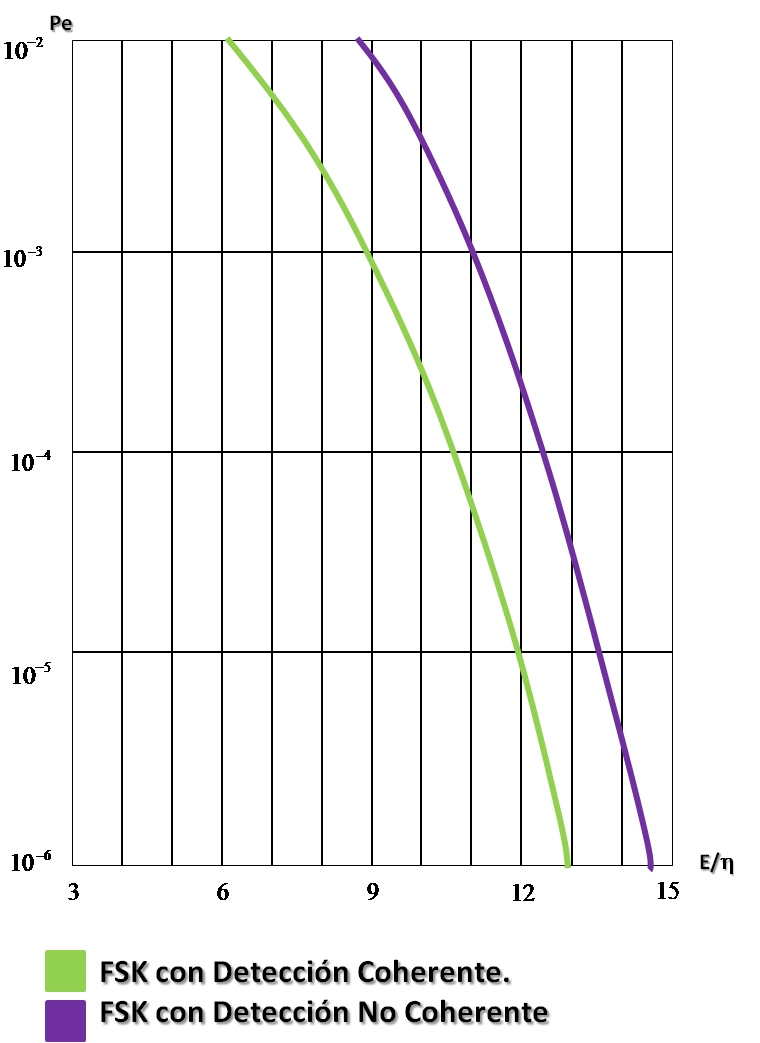
Se observa que las Probabilidades de Error para FSK y OOK no coherentes son prácticamente iguales. Sólo se diferenciarán para cuando Ep/ sea un valor muy pequeño.
Entre los dos sistemas, quien presenta menor probabilidad de error es FSK con Detección Coherente, lo que la hace más fuerte contra el ruido.
Simulaciones en labview
Los VIs correspondientes a la detección No Coherente pueden descargarse en los siguientes enlaces: