Background on a few adaptive filtering algorithms we tried in our echo cancellation project.
Adaptive filtering
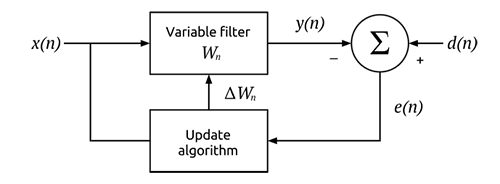
Adaptive filters are time-varying filters that use an update algorithm to create a finite impulse response (FIR) filter that outputs the best approximation of desired signal. Adaptive filters take in a desired signal and an input signal and update their parameters using feedback driven by the error signal. The adaptive filter finds the ideal filter coefficients for a filter that gives the least mean square of the error signal. The
error signal is defined as the difference of the desired signal and the output signal.
At every iteration (or block of samples) the gradient of the mean square error at that time is found, and is then used to adjust the filter coefficients at the time to converge towards the ideal filter coefficients.
Adaptive filtering block diagram
We trained adaptive filters using signals recorded in a low-echo environment using three algorithms to filter out echoes in an echoic room and in the OEDK classroom. Our desired signal is a recording of our signal in a low-echo environment that would give us a signal with minimal echo. This gave us a baseline for the distortion of the signal caused by our equipment.
Having gathered a baseline signal, we recorded our input signals in the echoic room and the OEDK classroom. The basic idea of the adaptive filter method is to take in a desired signal and an input signal and mimic an ideal filter with ideal filter coefficients that would make the output signal virtually echo-free and therefore comparable to the desired signal. We explored three different adaptive filtering algorithms for our project.
The least mean squares (lms) algorithm
The
LMS algorithm is a class of adaptive filter used to mimic a desired filter by finding the filter coefficients that relate to producing the least mean squares of the error signal (the difference between the desired and the actual signal). The algorithm begins by assuming small weights (zero in most cases), and at each step, by finding the gradient of the mean square error,
, the weights are updated using this cost function. Each iteration uses three steps:
Calculate the output of the filter.
Calculate the estimate of the error using the error signal.
Update the weights of the FIR coefficients.
is the output of the filter,
are the coefficients of the FIR filter,
is the input signal,
is the desired signal, and
is the step size.
The MathWorks
adaptfilt.lms documentation can be used in Matlab to create an LMS adaptive filter object.
The normalized lms (nlms) algorithm
NLMS allows for a variable step size
for each iteration. The first two steps of the algorithm are identical to the first two steps of the regular LMS algorithm.
Calculate the output of the filter.
Calculate the estimate of the error using the error signal.
The MathWorks
adaptfilt.nlms documentation can be used in Matlab to create an NLMS adaptive filter object.
The block lms (blms) algorithm
Rather than computing by discrete samples, the
BLMS algorithm calculates in blocks of data, reducing computation cost and improving the convergence rate. The BLMS algorithm can be implemented in the frequency domain using the Discrete Fourier Transform or the FFT.
Computational complexity:
, where
is the block length.
The MathWorks
adaptfilt.blms documentation can be used in Matlab to create a BLMS adaptive filter object.
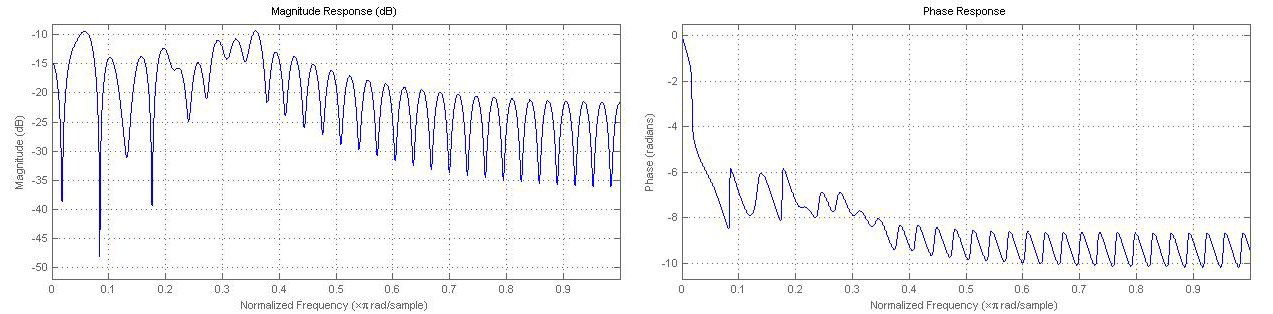
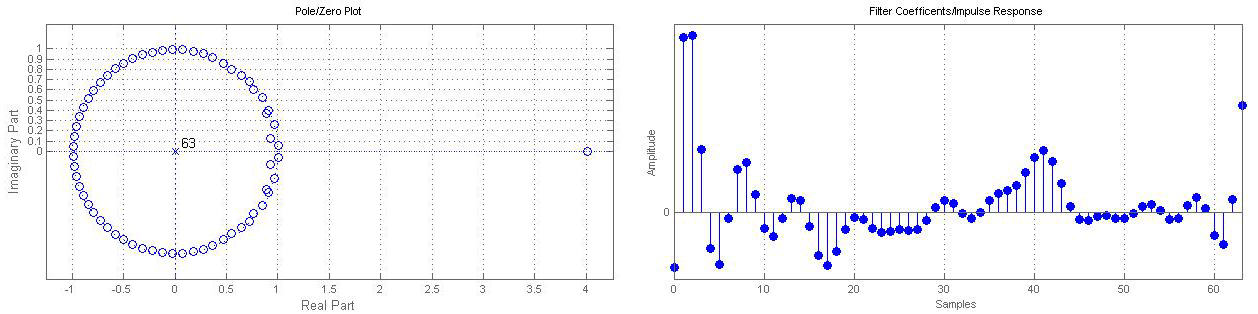
Example of an fir filter created using adaptfilt in matlab
This particular filter is a BLMS trained on the male voice signal. Notice that the unit circle is in the region of convergence in the pole/zero plot (the filter is BIBO stable).
Filtering in matlab
Choose a signal to be recorded. We chose a pseudo-dirac, an audiobook recording from
The Hunger Games and a recording from Winston Churchill's
A History of the English Peoples .
Record the signal being played in a room with desired acoustical properties. This is the desired signal,
. We chose a carpeted room in Hanszen College that had little discernible echo.
Record the signal being played in the echoed room. This is the input signal
. We recorded in the OEDK classroom and in an even more echoic classroom in Wiess College.
Import both responses into Matlab.
If you use Matlab's built-in adaptive filters. Create the adaptfilt object corresponding to the algorithm with desired parameters.
Use the
maxstep() function to check that your filter is stable. If not, adjust your step size.
Use the
filter() with your filter object, the input signal and the desire signal.
The desired signal,
, needs to be recorded in another room in order to neutralize the effects of the recording equipment and the amplifier. Using the original signal could lead to the filter trying to compensate for effects introduced by the equipment and the amplifier instead of the echoes caused by the room. Furthermore, the desired and input signals need to start at the same time. Cut out any silence beforehand so that the vectors line up, this way the adaptive filter sifts out the echoes at the appropriate times.
We used the
Audacity software to record the sounds, trim the beginning of the sound files, and zero pad them to equal length. We exported these files as .wav files and then, on Matlab, used the
wavread() function to import the sounds.
Links to MathWorks documentation for various adaptive filters can be found
here .
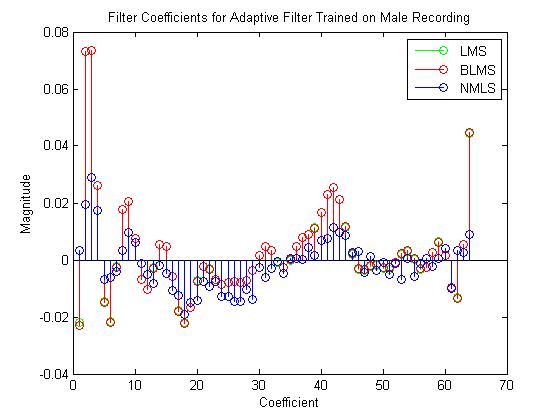
Fir filter coefficients for each algorithm
With the same training set (desired signal) each algorithm yields different filter coefficients. Step size: .0006. BLMS block length: 64.
Receive real-time job alerts and never miss the right job again
Source:
OpenStax, Characterization and application of echo cancellation methods. OpenStax CNX. Dec 17, 2012 Download for free at http://cnx.org/content/col11468/1.3
Google Play and the Google Play logo are trademarks of Google Inc.
Notification Switch
Would you like to follow the 'Characterization and application of echo cancellation methods' conversation and receive update notifications?