

| << Chapter < Page | Chapter >> Page > |
We now survey some common and important models in signal processing, each of which involves some notion of conciseness tothe signal structure. We see in each case that this conciseness gives rise to a low-dimensional geometry within the ambient signalspace.
Some of the simplest models in signal processing correspond to linear subspaces of the ambient signal space. Bandlimited signals are one such example. Supposing, for example,that a -periodic signal has Fourier transform for , the Shannon/Nyquist sampling theorem [link] states that such signals can be reconstructed from samples. Because the space of -bandlimited signals is closed under addition and scalar multiplication, it follows that the set of such signals forms a -dimensional linear subspace of .
Linear signal models also appear in cases where a model dictates a linear constraint on a signal. Considering a discrete length- signal , for example, such a constraint can be written in matrix form as
A very similar class of models concerns signals living in an affine space, which can be represented for a discrete signal using
Revisiting the dictionary setting (see Signal Dictionaries and Representations ), one last important linear model arises in cases where we select specific elements from the dictionary and then construct signals using linear combinations of only these elements; in this case the set of possible signals forms a -dimensional hyperplane in the ambient signal space (see [link] (a)).
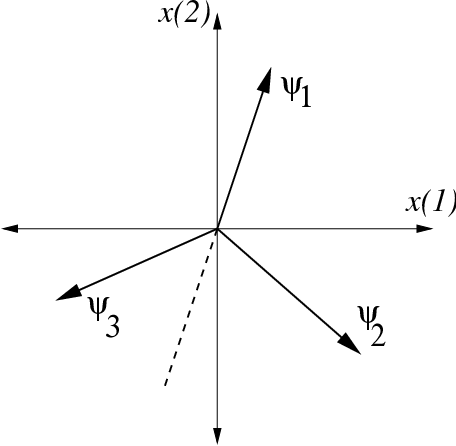
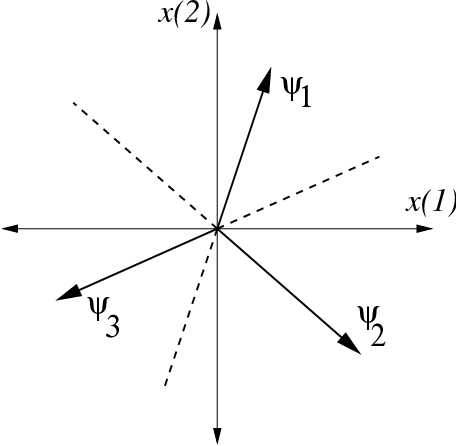
For example, we may construct low-frequency signals using
combinations of only the lowest frequency sinusoids from theFourier dictionary. Similar subsets may be chosen from the wavelet
dictionary; in particular, one may choose only elements that spana particular scaling space
. As we have mentioned previously,
harmonic dictionaries such as sinusoids and wavelets arewell-suited to representing smooth
Lipschitz smoothness We say a continuous-time function of
variables has
smoothness of order
, where
,
is an integer,
and
, if the following criteria are
met
[link] ,
[link] :
We will sometimes consider the space of smooth functions whose
partial derivatives up to order
are bounded by
some constant
. With somewhat nonstandard notation, we denote the space of such bounded
functions with bounded partial derivatives by
, where this notation carries an implicit
dependence on
. Observe that
, where
denotes rounding
up. Also, when
is an integer
includes as a subset the space traditionally denoted by the notation “
” (the
class of functions that have
continuous partial derivatives). signals. This can be seen in
the decay of their transform coefficients. For example, we canrelate the smoothness of a continuous 1-D function
to the
decay of its Fourier coefficients
; in particular, if
,
then
[link] .
In order to satisfy
, a signal must have a sufficiently fast decay of the Fourier transform coefficients
as
grows.
Wavelet coefficients exhibit a similar decay for smooth signals:supposing
and the wavelet basis
function has at least
vanishing moments, then as the
scale
, the magnitudes of the wavelet coefficients
decayas
[link] . (Recall that
implies
is well-approximated by a polynomial, and so due the
vanishing moments this polynomial will have zero contribution tothe wavelet coefficients.)
Notification Switch
Would you like to follow the 'Concise signal models' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|