

| << Chapter < Page | Chapter >> Page > |
and
For Type 4 they are
and
Using the frequency sampling scheme of [link] , the Type 3 equations become
and
For Type 4 they are
and
These Type 3 and 4 formulas are useful in the design of differentiators and Hilbert transformers [1,2,9,31]directly and as the base of the discrete least-squared-error methods inthe section Discrete Frequency Samples of Error .
A direct way of designing FIR filters from samples of a desired amplitude simply takes the sampled definition of the frequency response Equation 29 from FIR Digital Filters as
or the reduced form from Equation 37 from FIR Digital Filters as
where
for and solves the simultaneous equations for or equivalently, . Indeed, this approach can be taken with general non-linear phase design from
Indeed, this approach can be taken with general non-linear phase design from
for which gives equations with unknowns.
This design by solving simultaneous equations allows non-equally spaced samples of the desired response. The disadvantage comes from the numericalcalculations taking considerable time and being subject to inaccuracies if the equations are ill-conditioned.
The frequency sampling design method is interesting but is seldom used for direct design of filters. It is sometimes used as an interpolatingmethod in other design procedures to find from calculated . It is also used as a basis for a least squares design method discussed inthe next section.
To show some of the characteristics of FIR filters designed by frequency sampling, we will design a Type 1., length-15 FIR low pass filter. Desired amplitude responsewas one in the pass band and zero in the stop band. The cutoff frequency was set at approximately normalized. Using the formulas [link] , [link] , [link] , and [link] , we got impulse responses , which are use to generate the results shown in Figures [link] and [link] .
The Type 1, length-15 filter impulse response is:
The amplitude frequency response and zero locations are shown in [link] a
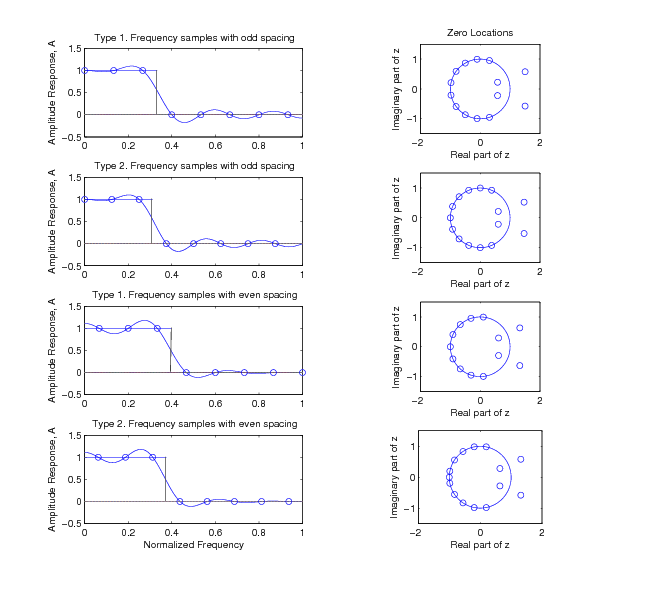
We see a good lowpass filter frequency response with the actual amplitude interpolating the desired values at 8 equally spaced points. Notice thereis considerable overshoot near the cutoff frequency. This is characteristic of frequency sampling designs and is a sort of “Gibbsphenomenon" but is even worse than that in a Fourier series expansion of a discontinuity. This Gibbs phenomenon could be reduced by using unequallyspaced samples and designing by solving simultaneous equations. Imagine sampling in the pass and stop bands of Figure 8c from FIR Digital Filters but not in the transitionband. The other responses and zero locations show theresults of different interpolation locations and lengths. Note the zero at -1 for the even filters.
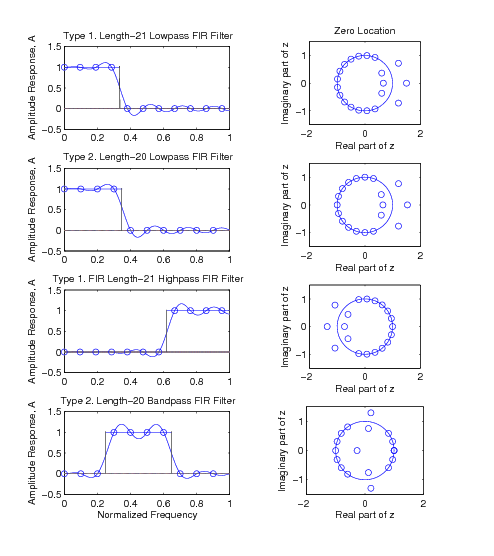
Examples of longer filters and of highpass and bandpass frequency sampling designs are shown in [link] . Note the difference of even and odd distributions of samples with with or without an interpolation pointat zero frequency. Note the results of different ideal filters and Type 1 or 2. Also note the relationship of the amplitude response and zerolocations.
Notification Switch
Would you like to follow the 'Digital signal processing and digital filter design (draft)' conversation and receive update notifications?

|
|

|
|

|
|

|
|

|
|

|
|

|
|

|
|
|
|
|
|
|