We used the average of these readings, i.e., (0.13+0.23)/2 = 0.18 and rounded to 0.2 sec.
Real-time system design
The system design comprises two parts:
Simulation, to determine the parameters of the Speed Control Transfer Function
Hardware Design of the interface circuit.
Simulation
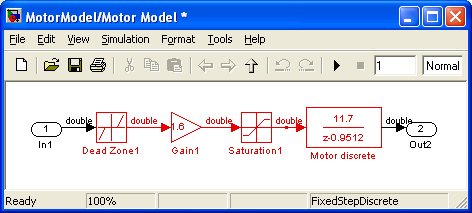
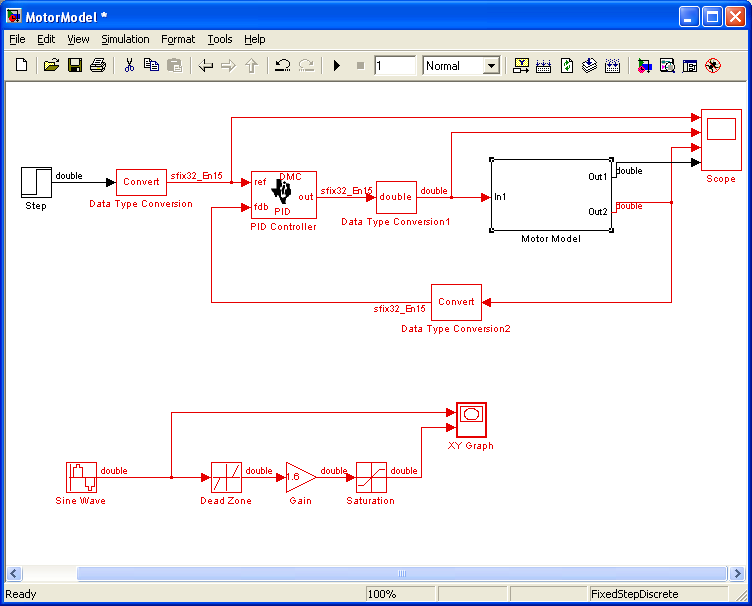
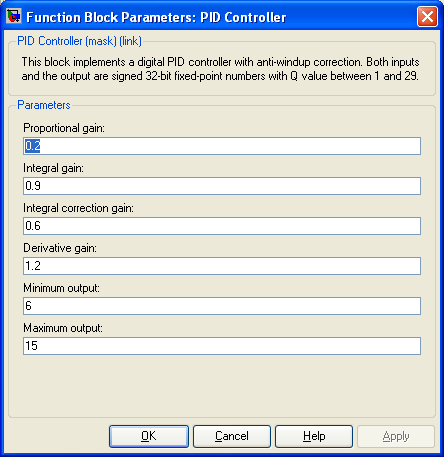
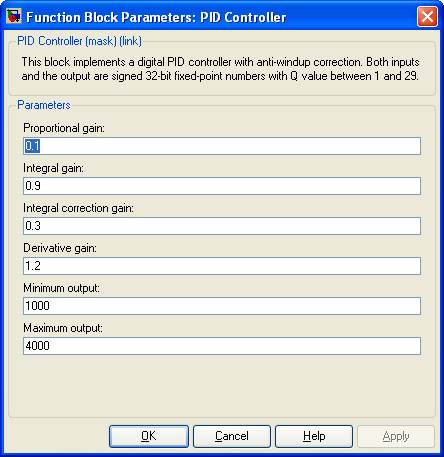
The speed control is a PID controller. A DC motor model (Figure 14) was created. The complete control loop model is shown in Figure 15. Figure 16 shows the parameters chosen for the PID controller.
DC Motor ModelLoop Control ModelPID Controller Parameters
Hardware design
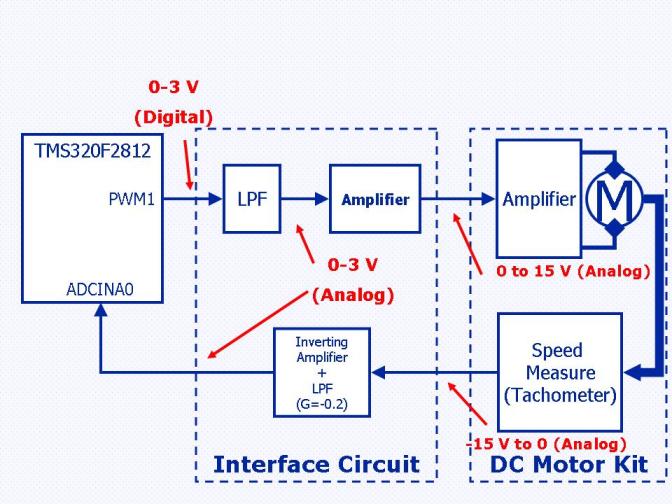
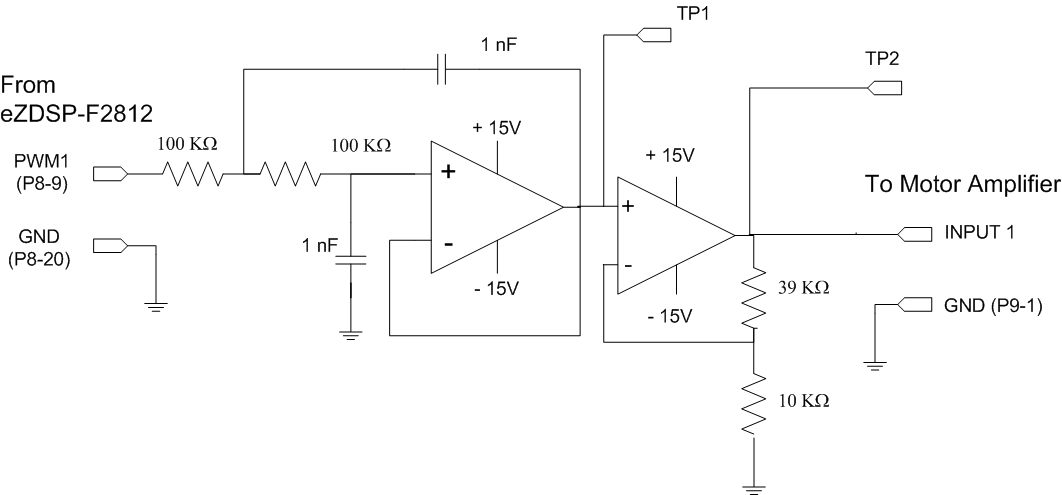
The connection between the eZDSP and the Motor Kit requires a dedicated interface circuit, implementing the Low Pass Filter (used for the Digital to Analog conversion) and adapting the voltage levels at the eZDSP (0 to 3V) to those of the DC Motor Kit (0-15V). The various signal types and their voltage range are shown in .
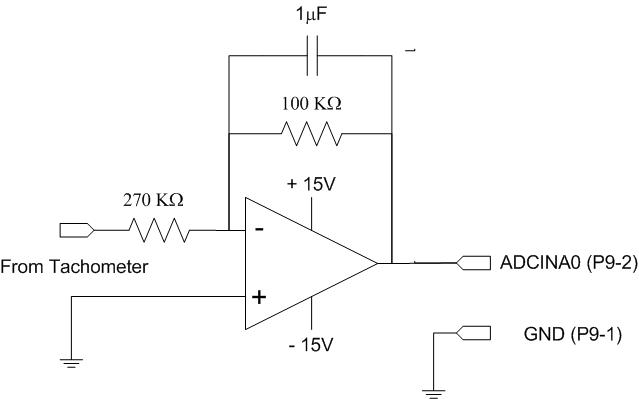
The interface circuit contains two blocks. The first is LPF with an amplifier (shown in Figure 18), connected between the PWM output and the servo amplifier input. The second block is an attenuator (shown in Figure 19) connected between the tachometer output and the Analog to Digital Input of the eZDSP.
Signal Types and Voltage Levels
LPF + Amplifier CircuitThe Inverting Amplifier with LPF
Real time implementation
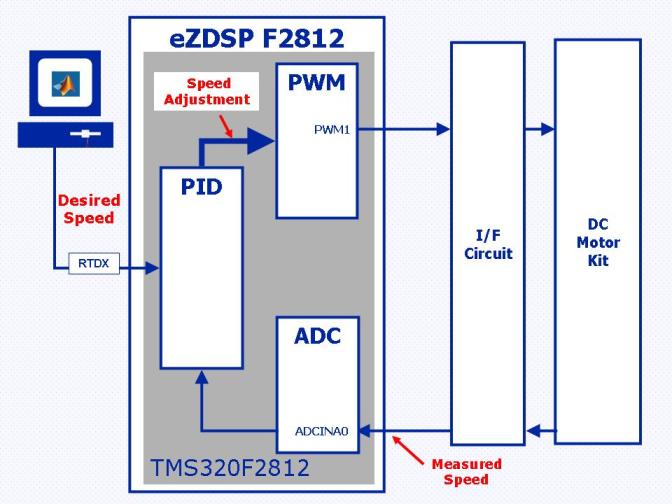
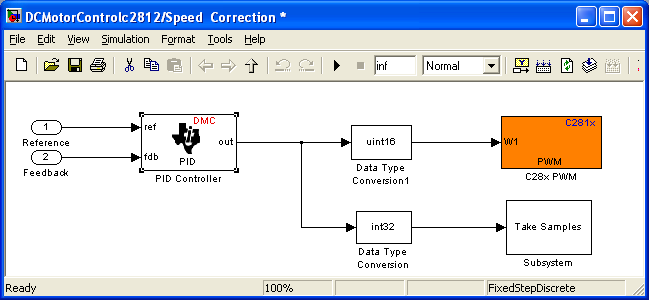
The control loop was implemented in the eZDSP F2812 as shown in Figure 20. The PID controller obtained in the previous chapter was implemented in the DSP. The environment is shown in Figure 21.
The real-time implementation model will be created from the "DC Motor Speed Control via RTDX" SIMULINK demo. In the original demo model the loop is closed by QEP block, we will use a tachometer connected to the Analog to Digital Converter module for speed measurement.
The Model and its subsystems are shown in Figures Figure 22, Figure 23 and Figure 24.
Copy the following files into your working directory:
c2812speedcontrolDC.mdl
runc2812speedcontrolDC.m
runc2812speedcontrolDC.m
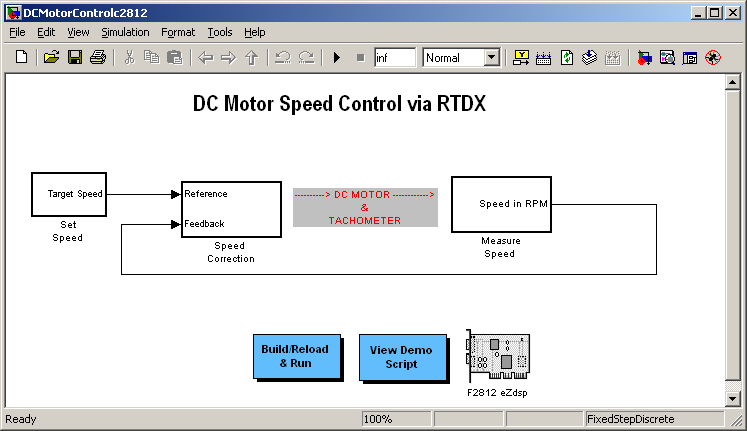
Open the c2812speedcontrolDC.mdl model and save it as "DCMotorControlc2812.mdl"(please refer to Figure 21
The model is shown here after deleting the “Info” box. ).
Real-Time Implementation Model
Double-click the Speed Correction Block, and you will see:
Figure 22: Speed Control
Configure the C28x PWM block as follows:
Figure 23: PWM Configuration
Configure the "PID Controller" block as follows:
PID Configuration
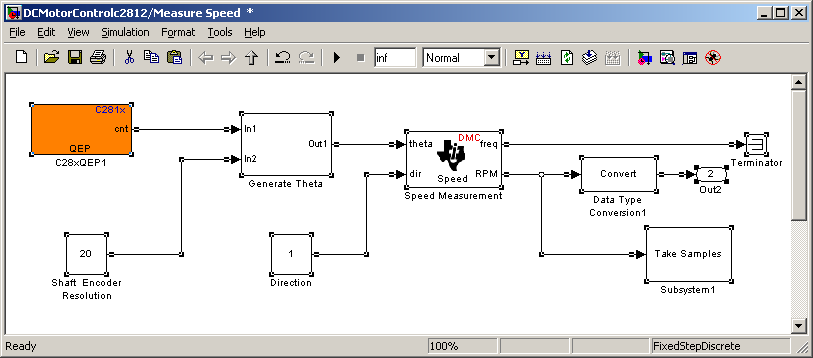
Double-click the Speed Correction Block, and you will see:
QEP Based Speed Measurement
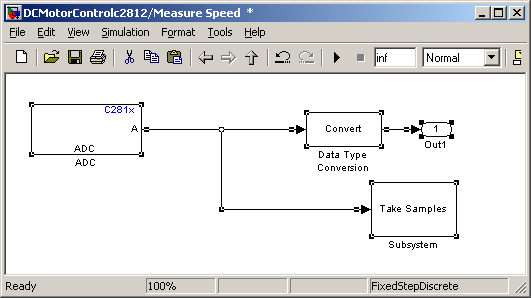
Delete the selected blocks and replace them by the ADC block from Open the ADC block from the C281x Chip support group from the C2000 Target Preferences, and connect is as follows:
ADC+Tachometer Based Speed Measurement
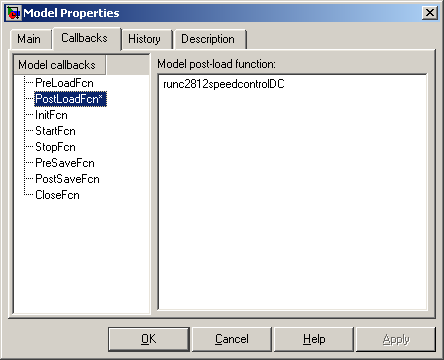
Now the model is ready for real-time, we need however to update the MATLAB script file. Open the “Model Properties” from “File” menu. Change the PostLoadFcn callback to runc2812speedcontrolIDC, as shown:
Model Callback
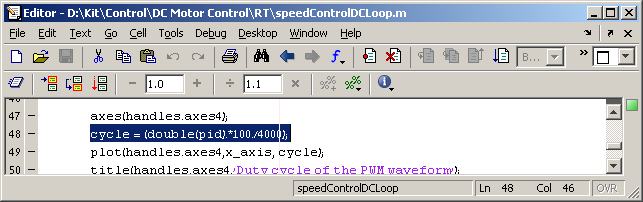
The next step is to change the original PWM range (up to 64000) to the desired range (up to 4000). Open the “speddControlIDCLoop.m” file with the MATLAB editor, an change on line 48 the command:
cycle = (double(pid).*100./64000);to
cycle = (double(pid).*100./4000); Please refer to the following picture:
Changing the PWM range
Activate the motor
Activate CCS.
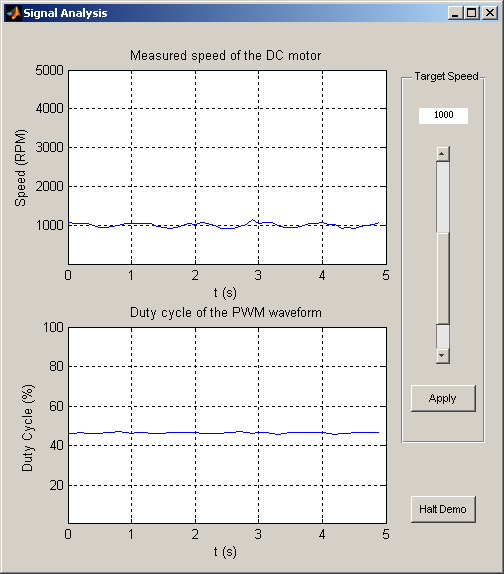
Click the Build/Reload&Run box, the following window should appear:
Speed Control GUI
You may change the speed of the motor using the slider in the right hand side and the “Apply” button.
David M. Alter, " Using PWM Output as a Digital-to-Analog Converter on a TMS320F280x", TI Application Report SPRAA88 , September 2008
(External Link)
Questions & Answers
A golfer on a fairway is 70 m away from the green, which sits below the level of the fairway by 20 m. If the golfer hits the ball at an angle of 40° with an initial speed of 20 m/s, how close to the green does she come?
A mouse of mass 200 g falls 100 m down a vertical mine shaft and lands at the bottom with a speed of 8.0 m/s. During its fall, how much work is done on the mouse by air resistance
Chemistry is a branch of science that deals with the study of matter,it composition,it structure and the changes it undergoes
Adjei
please, I'm a physics student and I need help in physics
Adjanou
chemistry could also be understood like the sexual attraction/repulsion of the male and female elements. the reaction varies depending on the energy differences of each given gender. + masculine -female.
Pedro
A ball is thrown straight up.it passes a 2.0m high window 7.50 m off the ground on it path up and takes 1.30 s to go past the window.what was the ball initial velocity
2. A sled plus passenger with total mass 50 kg is pulled 20 m across the snow (0.20) at constant velocity by a force directed 25° above the horizontal. Calculate (a) the work of the applied force, (b) the work of friction, and (c) the total work.
you have been hired as an espert witness in a court case involving an automobile accident. the accident involved car A of mass 1500kg which crashed into stationary car B of mass 1100kg. the driver of car A applied his brakes 15 m before he skidded and crashed into car B. after the collision, car A s
can someone explain to me, an ignorant high school student, why the trend of the graph doesn't follow the fact that the higher frequency a sound wave is, the more power it is, hence, making me think the phons output would follow this general trend?
Nevermind i just realied that the graph is the phons output for a person with normal hearing and not just the phons output of the sound waves power, I should read the entire thing next time
Joseph
Follow up question, does anyone know where I can find a graph that accuretly depicts the actual relative "power" output of sound over its frequency instead of just humans hearing
Joseph
"Generation of electrical energy from sound energy | IEEE Conference Publication | IEEE Xplore" ***ieeexplore.ieee.org/document/7150687?reload=true
A string is 3.00 m long with a mass of 5.00 g. The string is held taut with a tension of 500.00 N applied to the string. A pulse is sent down the string. How long does it take the pulse to travel the 3.00 m of the string?
Receive real-time job alerts and never miss the right job again
Source:
OpenStax, From matlab and simulink to real-time with ti dsp's. OpenStax CNX. Jun 08, 2009 Download for free at http://cnx.org/content/col10713/1.1
Google Play and the Google Play logo are trademarks of Google Inc.
Notification Switch
Would you like to follow the 'From matlab and simulink to real-time with ti dsp's' conversation and receive update notifications?